
EECS349 Final Project: Classifying Task Difficulty
 For my first foray into machine learning, I took EECS349: Machine Learning.
This class covered many of the basics of the theory behind machine learning and exposed me to some of the tools used in this domain. To complete the class, we needed to complete a project implementing
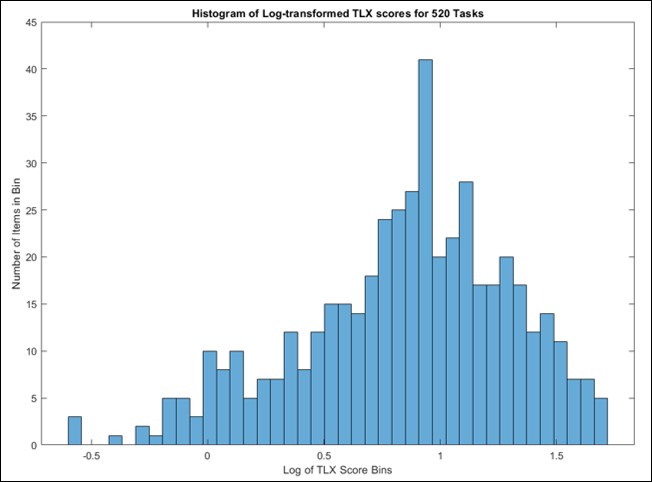
some of the concepts learned in class. I attempted to reuse data from another project (link) to classify which robotic arm grasping tasks are easy or hard. While my results were mixed, I learned how to
use TensorFlow, KERAS, and I improved upon my Python abilities.
For my first foray into machine learning, I took EECS349: Machine Learning.
This class covered many of the basics of the theory behind machine learning and exposed me to some of the tools used in this domain. To complete the class, we needed to complete a project implementing
some of the concepts learned in class. I attempted to reuse data from another project (link) to classify which robotic arm grasping tasks are easy or hard. While my results were mixed, I learned how to
use TensorFlow, KERAS, and I improved upon my Python abilities.
For more information, you can visit this project's webpage or see my git repository for this class.
EECS495: Introduction to Swarms and Multi-Robot Systems
 EECS495: Introduction to Swarms and Multi-Robot Systems reviewed the
benefits and drawbacks of multi-robot systems, commonly known as swarm robots. We reviewed nearly 60 papers in the field of swarm robotics and
implemented swarm robot behavior using a kilobot simulator in C++. The kilobots are small, cheap robots developed for studying swarm robots. The simulator was developed for students
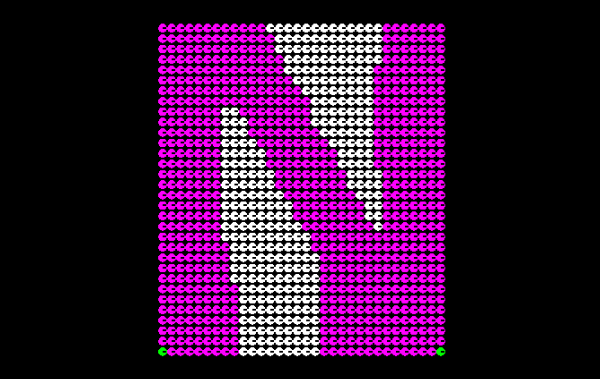
to learn about swarm behavior and for researchers to test kilobot features. Our projects for this class included replicating shapes using the kilobot's onboard LEDs and
generating a self-organizing swarm by realizing the brazil nut effect.
EECS495: Introduction to Swarms and Multi-Robot Systems reviewed the
benefits and drawbacks of multi-robot systems, commonly known as swarm robots. We reviewed nearly 60 papers in the field of swarm robotics and
implemented swarm robot behavior using a kilobot simulator in C++. The kilobots are small, cheap robots developed for studying swarm robots. The simulator was developed for students
to learn about swarm behavior and for researchers to test kilobot features. Our projects for this class included replicating shapes using the kilobot's onboard LEDs and
generating a self-organizing swarm by realizing the brazil nut effect.
For more information, you can visit my git repository for this class.
ME495: Mechatronics with Quadrotor Project
 I constructed and programmed an autonomous quadrotor for ME495:
Mechatronics with Quadrotor Project. This drone could be both manually driven because of automated stability control (PID controllers) or flown autonomously to a point in space beneath a beacon (more PID-controllers).
To complete this class, the drone was constructed from pre-fabricated parts and programmed in C++ on a RapsberryPi. To characterize the drone's
stability, it was suspended between two benches and impulses (a gloved finger) were applied to the system, as seen on the right.
I constructed and programmed an autonomous quadrotor for ME495:
Mechatronics with Quadrotor Project. This drone could be both manually driven because of automated stability control (PID controllers) or flown autonomously to a point in space beneath a beacon (more PID-controllers).
To complete this class, the drone was constructed from pre-fabricated parts and programmed in C++ on a RapsberryPi. To characterize the drone's
stability, it was suspended between two benches and impulses (a gloved finger) were applied to the system, as seen on the right.
For more information, you can visit my git repository for this class.