
Wheel-to-Track Transformer Robot
 I served as the lead electrical engineer on the second prototype of the wheel-to-track transformer robot built as part of DARPA's Ground Vehicle X program. This wheel-to-track
At speed, this wheel can transform from a normal wheel to a triangular track with the purpose of assisting military vehicles navigate uneven terrain. For this
prototype, I built upon existing knowledge to design the wheel's electronics.
I served as the lead electrical engineer on the second prototype of the wheel-to-track transformer robot built as part of DARPA's Ground Vehicle X program. This wheel-to-track
At speed, this wheel can transform from a normal wheel to a triangular track with the purpose of assisting military vehicles navigate uneven terrain. For this
prototype, I built upon existing knowledge to design the wheel's electronics.
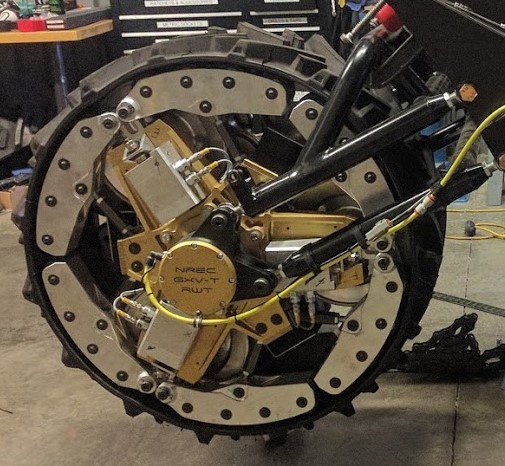 I designed and programmed the controller that assisted in the wheel's transformation and monitored it's state by programming a STM microcontroller and realizing analog circuits to suppot the wheel's sensors. I integrated an off-the-shelf
motor controller on the wheel to control transformation and I designed the cable harnesses both on and external to the wheel. Furthermore, I designed
the electronics located on the test platform to both power and monitor the wheel's external state. I also worked with our mechanical engineering team
to ensure the electronics were designed to sustain the shock, vibration, and environmental requirements. Finally, I presented regular updates to DARPA sponsors
through both technical reports and presentations. The wheeltrack was delivered on time and the lessons learned from my prototype led to the development of the third
edition of the wheeltrack system displayed in the image on this page.
I designed and programmed the controller that assisted in the wheel's transformation and monitored it's state by programming a STM microcontroller and realizing analog circuits to suppot the wheel's sensors. I integrated an off-the-shelf
motor controller on the wheel to control transformation and I designed the cable harnesses both on and external to the wheel. Furthermore, I designed
the electronics located on the test platform to both power and monitor the wheel's external state. I also worked with our mechanical engineering team
to ensure the electronics were designed to sustain the shock, vibration, and environmental requirements. Finally, I presented regular updates to DARPA sponsors
through both technical reports and presentations. The wheeltrack was delivered on time and the lessons learned from my prototype led to the development of the third
edition of the wheeltrack system displayed in the image on this page.
Further Information
I worked on this project while I was an electrical engineer at Carnegie Mellon University's National Robotics Engineering Center. NREC is known for its close collaborations with government and industry sponsors to apply robotics technologies to different sectors. This project was recognized by Popular Science as one of the "Best of What's New" in 2018.
Skills and Tools Used
- Schematic/PCB Design
- Altium Designer
- Cable Harness Design
- Microcontroller Programming/C++
- Rugged Systems Design
- Project Management